
A Novel Zeroing Neural Network for Solving Time-Varying Quadratic Matrix Equations against Linear Noises
 , , ,
, , ,
Abstract
:1. Introduction
- In order to suppress linear noise perturbation for the solution of the time-varying QME, a DIEZNN model is first proposed with a new error-processing method.
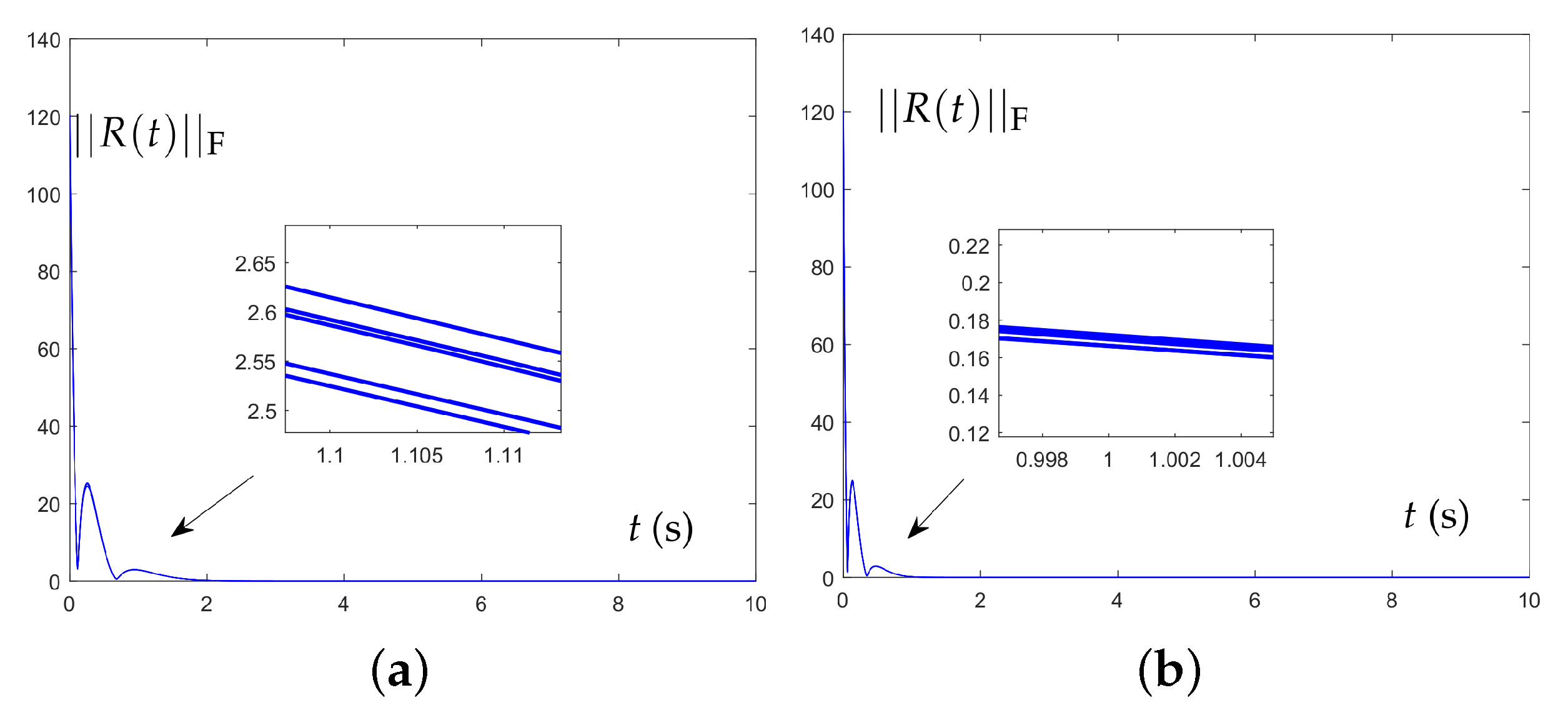
- Theoretical analysis demonstrates that the proposed DIEZNN model converges to the theoretical solution of the QME globally. More importantly, the DIEZNN model is proved to also be able to converge to the theoretical solution of the QME in the case of linear noise interference.
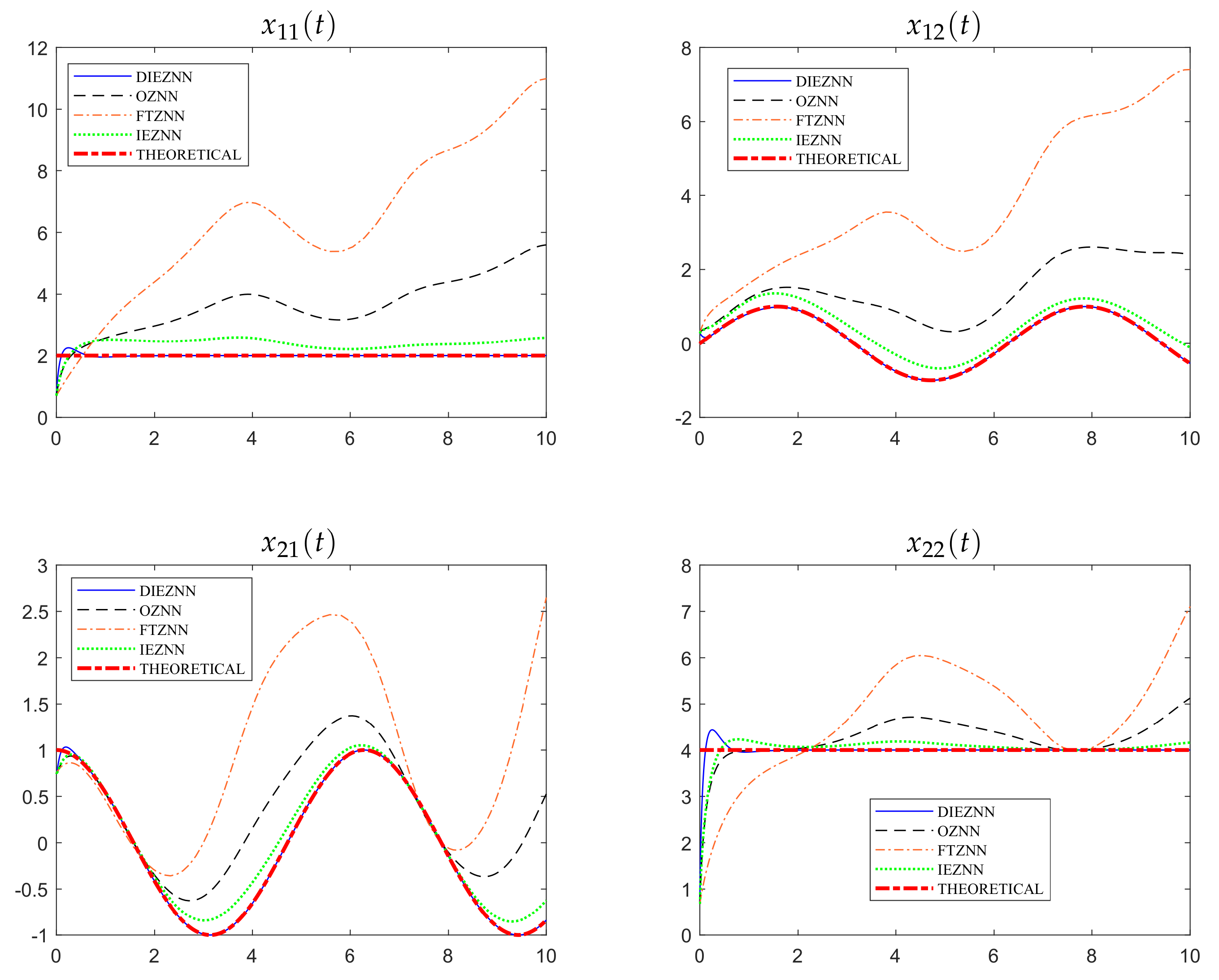
- The superiority of the DIEZNN model to solve the time-varying QME under linear noise, compared with other methods such as the OZNN, FTZNN and IEZNN, is further verified by three simulation examples.
2. Problem Formulation
3. Dynamic Recurrent Neural Network Method
3.1. OZNN Model
3.2. FTZNN Model
3.3. IEZNN Model
3.4. DIEZNN Model
4. Theoretical Analysis and Results
5. Illustrative Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| OZNN | Original zeroing neural network |
| FTZNN | Finite-time zeroing neural network |
| IEZNN | Integration-enhanced zeroing neural network |
| LFAZNN | Li function-activated zeroing neural network |
| DIEZNN | Double-integration-enhanced zeroing neural network |
| QME | Quadratic matrix equation |
References
- Benner, P. Computational methods for linear-quadratic optimization. Rend. Del Circ. Mat. Palermo Suppl. 1999, 58, 21–56. [Google Scholar]
- Laub, A.J. Invariant subspace methods for the numerical solution of Riccati equations. In The Riccati Equation; Springer: Berlin/Heidelberg, Germany, 1991; pp. 163–196. [Google Scholar]
- Lancaster, P.; Rodman, L. Algebraic Riccati Equations; Clarendon Press: Oxford, UK, 1995. [Google Scholar]
- Lancaster, P. Lambda-Matrices and Vibrating Systems; Courier Corporation: Chelmsford, MA, USA, 2002. [Google Scholar]
- Smith, H.A.; Singh, R.K.; Sorensen, D.C. Formulation and solution of the non-linear, damped eigenvalue problem for skeletal systems. Int. J. Numer. Methods Eng. 1995, 38, 3071–3085. [Google Scholar] [CrossRef]
- Zheng, Z.; Ren, G.; Wang, W. A reduction method for large scale unsymmetric eigenvalue problems in structural dynamics. J. Sound Vib. 1997, 199, 253–268. [Google Scholar] [CrossRef]
- Guo, C.H.; Lancaster, P. Algorithms for hyperbolic quadratic eigenvalue problems. Math. Comput. 2005, 74, 1777–1791. [Google Scholar] [CrossRef]
- Guo, C.H. Numerical solution of a quadratic eigenvalue problem. Linear Algebra Its Appl. 2004, 385, 391–406. [Google Scholar] [CrossRef]
- Hochstenbach, M.E.; van der Vorst, H.A. Alternatives to the Rayleigh quotient for the quadratic eigenvalue problem. SIAM J. Sci. Comput. 2003, 25, 591–603. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Meini, B.; Rhee, N.H. A shifted cyclic reduction algorithm for quasi-birth-death problems. SIAM J. Matrix Anal. Appl. 2002, 23, 673–691. [Google Scholar] [CrossRef]
- Higham, N.J.; Kim, H.M. Numerical analysis of a quadratic matrix equation. IMA J. Numer. Anal. 2000, 20, 499–519. [Google Scholar] [CrossRef] [Green Version]
- Guo, C.H. Convergence rate of an iterative method for a nonlinear matrix equation. SIAM J. Matrix Anal. Appl. 2001, 23, 295–302. [Google Scholar] [CrossRef]
- Guo, C.H. Convergence Analysis of the Latouche–Ramaswami Algorithm for Null Recurrent Quasi-Birth-Death Processes. SIAM J. Matrix Anal. Appl. 2002, 23, 744–760. [Google Scholar] [CrossRef] [Green Version]
- Davis, G.J. Numerical solution of a quadratic matrix equation. SIAM J. Sci. Stat. Comput. 1981, 2, 164–175. [Google Scholar] [CrossRef]
- Davis, G.J. Algorithm 598: An algorithm to compute solvent of the matrix equation AX 2+ BX+ C= 0. ACM Trans. Math. Softw. (TOMS) 1983, 9, 246–254. [Google Scholar] [CrossRef]
- Benner, P.; Byers, R. An exact line search method for solving generalized continuous-time algebraic Riccati equations. IEEE Trans. Autom. Control 1998, 43, 101–107. [Google Scholar] [CrossRef] [Green Version]
- Long, J.h.; Hu, X.y.; Zhang, L. Improved Newton’s method with exact line searches to solve quadratic matrix equation. J. Comput. Appl. Math. 2008, 222, 645–654. [Google Scholar] [CrossRef] [Green Version]
- Higham, N.J.; Kim, H.M. Solving a quadratic matrix equation by Newton’s method with exact line searches. SIAM J. Matrix Anal. Appl. 2001, 23, 303–316. [Google Scholar] [CrossRef] [Green Version]
- Meini, B. The matrix square root from a new functional perspective: Theoretical results and computational issues. SIAM J. Matrix Anal. Appl. 2004, 26, 362–376. [Google Scholar] [CrossRef]
- Beavers, A.N., Jr.; Denman, E.D. A new solution method for quadratic matrix equations. Math. Biosci. 1974, 20, 135–143. [Google Scholar] [CrossRef]
- Na, J.; Ren, X.; Zheng, D. Adaptive control for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 370–382. [Google Scholar]
- Stanimirović, P.S.; Živković, I.S.; Wei, Y. Recurrent neural network approach based on the integral representation of the Drazin inverse. Neural Comput. 2015, 27, 2107–2131. [Google Scholar] [CrossRef]
- Chen, K. Recurrent implicit dynamics for online matrix inversion. Appl. Math. Comput. 2013, 219, 10218–10224. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y. Simulation and comparison of Zhang neural network and gradient neural network solving for time-varying matrix square roots. In Proceedings of the 2008 Second International Symposium on Intelligent Information Technology Application, Shanghai, China, 20–22 December 2008; IEEE: Piscataway, NJ, USA, 2008; Volume 2, pp. 966–970. [Google Scholar]
- Zhang, Y.; Chen, K.; Tan, H.Z. Performance analysis of gradient neural network exploited for online time-varying matrix inversion. IEEE Trans. Autom. Control 2009, 54, 1940–1945. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Ruan, G. Performance analysis of gradient neural network exploited for online time-varying quadratic minimization and equality-constrained quadratic programming. Neurocomputing 2011, 74, 1710–1719. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y. From different Zhang functions to various ZNN models accelerated to finite-time convergence for time-varying linear matrix equation. Neural Process. Lett. 2014, 39, 309–326. [Google Scholar] [CrossRef]
- Guo, D.; Zhang, Y. Zhang neural network, Getz–Marsden dynamic system, and discrete-time algorithms for time-varying matrix inversion with application to robots’ kinematic control. Neurocomputing 2012, 97, 22–32. [Google Scholar] [CrossRef]
- Li, S.; Chen, S.; Liu, B. Accelerating a recurrent neural network to finite-time convergence for solving time-varying Sylvester equation by using a sign-bi-power activation function. Neural Process. Lett. 2013, 37, 189–205. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y. Two new types of Zhang neural networks solving systems of time-varying nonlinear inequalities. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2363–2373. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, Y.; Li, S.; Zhang, Y. Modified ZNN for time-varying quadratic programming with inherent tolerance to noises and its application to kinematic redundancy resolution of robot manipulators. IEEE Trans. Ind. Electron. 2016, 63, 6978–6988. [Google Scholar] [CrossRef]
- Guo, D.; Zhang, Y. Li-function activated ZNN with finite-time convergence applied to redundant-manipulator kinematic control via time-varying Jacobian matrix pseudoinversion. Appl. Soft Comput. 2014, 24, 158–168. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, Y.; Li, S. Integration-enhanced Zhang neural network for real-time-varying matrix inversion in the presence of various kinds of noises. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 2615–2627. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Tan, N. Time-varying matrix square roots solving via Zhang neural network and gradient neural network: Modeling, verification and comparison. In Proceedings of the International Symposium on Neural Networks, Wuhan, China, 26–29 May 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 11–20. [Google Scholar]
- Zhang, Y.; Li, W.; Guo, D.; Ke, Z. Different Zhang functions leading to different ZNN models illustrated via time-varying matrix square roots finding. Expert Syst. Appl. 2013, 40, 4393–4403. [Google Scholar] [CrossRef]
- Xiao, L. Accelerating a recurrent neural network to finite-time convergence using a new design formula and its application to time-varying matrix square root. J. Frankl. Inst. 2017, 354, 5667–5677. [Google Scholar] [CrossRef]
- Sabzalian, M.H.; Mohammadzadeh, A.; Rathinasamy, S.; Zhang, W. A developed observer-based type-2 fuzzy control for chaotic systems. Int. J. Syst. Sci. 2021, 1–20. [Google Scholar] [CrossRef]
- Sabzalian, M.H.; Mohammadzadeh, A.; Lin, S.; Zhang, W. A robust control of a class of induction motors using rough type-2 fuzzy neural networks. Soft Comput. 2020, 24, 9809–9819. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | OZNN model | FTZNN model | IEZNN model | DIEZNN model |
|---|---|---|---|---|
| Problem | QME | QME | QME | QME |
| Design Formula | ||||
| Noise | zero noise | zero noise | linear noise | linear noise |
| Residual Error | infinity | infinity | constant | zero |
| Robustness | rare | rare | weak | strong |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Qu, L.; Li, Z.; Liao, B.; Li, S.; Rong, Y.; Liu, Z.; Liu, Z.; Lin, K. A Novel Zeroing Neural Network for Solving Time-Varying Quadratic Matrix Equations against Linear Noises. Mathematics 2023, 11, 475. https://doi.org/10.3390/math11020475
Li J, Qu L, Li Z, Liao B, Li S, Rong Y, Liu Z, Liu Z, Lin K. A Novel Zeroing Neural Network for Solving Time-Varying Quadratic Matrix Equations against Linear Noises. Mathematics. 2023; 11(2):475. https://doi.org/10.3390/math11020475
Chicago/Turabian StyleLi, Jianfeng, Linxi Qu, Zhan Li, Bolin Liao, Shuai Li, Yang Rong, Zheyu Liu, Zhijie Liu, and Kunhuang Lin. 2023. "A Novel Zeroing Neural Network for Solving Time-Varying Quadratic Matrix Equations against Linear Noises" Mathematics 11, no. 2: 475. https://doi.org/10.3390/math11020475